製作しているバレットタイム撮影システムで各カメラの視線が一点に定まっていないと生成した動画がブレる。しかし,全てのカメラの視線を一点に集めるのは至難の技。そこで,撮影した画像をソフトウェアで処理して視線合わせを行うことにした。画像処理プログラムは書いたことがないのでゼロから学んで行く。
NT金沢やMaker Faire TokyoでOpenCVを使えば簡単と聞いたので,Python + OpenCV の環境下で試行して見る。
OpenCVのインストール
$ sudo apt-get install libopencv-dev $ sudo apt-get install python-opencv
2016/4/4 Rasbianを最新にしたら「GdkGLExt-WARNING **: Window system doesn’t support OpenGL.」が出たので次をインストール
$ sudo apt-get install libgl1-mesa-dri
Pythonを起動しimport cv2 でエラーが出なければインストールOK
$ python Python 2.7.3 (default, Mar 18 2014, 05:13:23) [GCC 4.6.3] on linux2 Type "help", "copyright", "credits" or "license" for more information. >>> import cv2 >>>
USBカメラでキャプチャして表示
import cv2
#キャプチャデバイスの設定 0:/dev/video0
cap = cv2.VideoCapture(0)
while(1):
# キャプチャデバイスから1フレーム読む
ret, frame = cap.read()
# サイズを320x240に変更
frame = cv2.resize(frame,(320,240))
# 表示
cv2.imshow('frame',frame)
# ESCキーが押されたらwhileループを抜ける
k = cv2.waitKey(5) & 0x7F
if k == 27:
break
# 表示ウインドウを閉じる
cv2.destroyAllWindows()
赤色を抜き出す
import cv2
import numpy as np
cap = cv2.VideoCapture(0)
while(1):
# Take each frame
ret, frame = cap.read()
frame = cv2.resize(frame,(320,240))
# Convert BGR to HSV
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# define range of target color in HSV
lower_color = np.array([0,150,150])
upper_color = np.array([25,255,255])
# Threshold the HSV image to get only blue colors
mask = cv2.inRange(hsv, lower_color, upper_color)
# Bitwise-AND mask and original image
res = cv2.bitwise_and(frame,frame, mask= mask)
# show
cv2.imshow('frame',frame)
cv2.imshow('mask',mask)
cv2.imshow('res',res)
k = cv2.waitKey(5) & 0x7F
if k == 27:
break
cv2.destroyAllWindows()
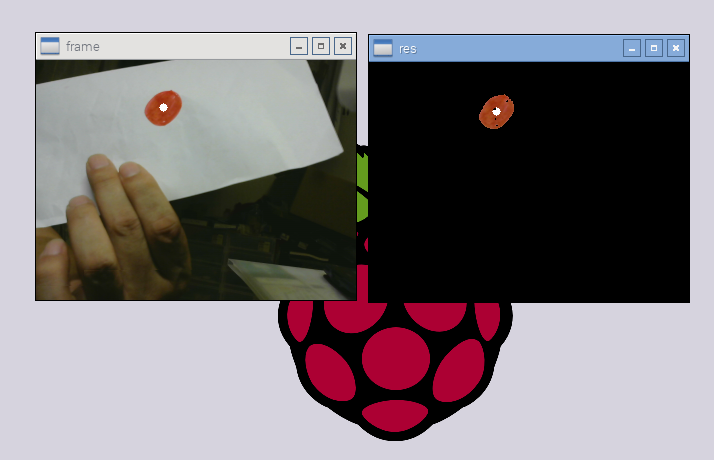
赤色マーカをトラッキング
import cv2
import numpy as np
cap = cv2.VideoCapture(0)
while(1):
# Take each frame
ret, frame = cap.read()
frame = cv2.resize(frame,(320,240))
# Convert BGR to HSV
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# define range of target color in HSV
lower_color = np.array([0,150,150])
upper_color = np.array([25,255,255])
# Threshold the HSV image to get only blue colors
mask = cv2.inRange(hsv, lower_color, upper_color)
# Take the moments to get the centroid
moments = cv2.moments(mask)
m00 = moments['m00']
centroid_x, centroid_y = None, None
if m00 != 0:
centroid_x = int(moments['m10']/m00)
centroid_y = int(moments['m01']/m00)
# Assume no centroid
ctr = (-1,-1)
# Use centroid if it exists
if centroid_x != None and centroid_y != None:
ctr = (centroid_x, centroid_y)
# Put disk in at centroid in image
cv2.circle(frame, ctr, 4, (255,255,255),-1)
# Bitwise-AND mask and original image
res = cv2.bitwise_and(frame,frame, mask= mask)
cv2.imshow('frame',frame)
#cv2.imshow('mask',mask)
cv2.imshow('res',res)
k = cv2.waitKey(5) & 0x7F
if k == 27:
break
cv2.destroyAllWindows()
{kind=link}